Liftware: Self-stabilizing Eating Utensils for Individuals With Hand Tremor
La idea fue desarrollada por Anupam Pathak.
El dispositivo ha sido respaldado por los Institutos Nacionales de Salud, la Academia Estadounidense de Neurología y la Cancelación Activa de Tecnología.
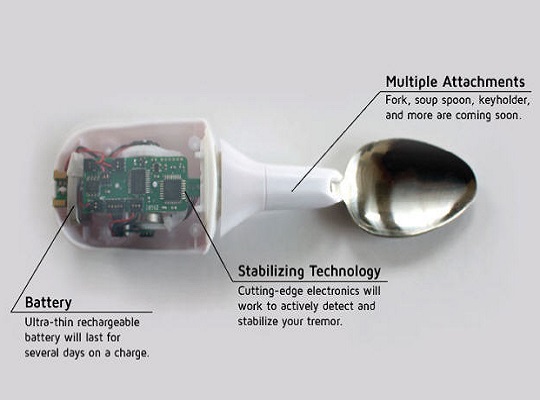
El utensilio usa unos sensores y un microship para detectar la fuerza y la dirección con la que se ejerce el temblor en la mano y la punta del mango se mueve en dirección opuesta automáticamente para contrarrestar el movimiento brusco.
Este utensilio ajustable (cuchara o tenedor) cuesta alrededor de $ 200. Pesa aproximadamente 100g y es de batería recargable, aproximadamente dura 90min Un estudio encontró que el dispositivo reduce el temblor entre 71% a 76% al sostener, levantar y transferir.
El costo aproximado de este utensilio es de $299.
Bibliografía: Smith, N. (2015). Liftware: Self-stabilizing Eating Utensils for Individuals With Hand Tremor. CADTH ISSUES IN EMERGING HEALTH TECHNOLOGIES, (142), ,